




三菱運動控制器在小型輥鍛傳送系統中的應用
http://www.ydsygx.cn凌控導讀:輥鍛傳送系統是鍛造行業應用較多的系統。該系統由輥鍛機,機械手傳送機構組成,替代傳統的自由鍛,人工送料系統。輥鍛傳送系統提高了自動化水平,提高產品質量精度,降低了工人勞動強度,節約成本。
一 概述
輥鍛傳送系統是鍛造行業應用較多的系統三菱 該系統由輥鍛機,機械手傳送機構組成,替代傳統的自由鍛,人工送料系統三菱 輥鍛傳送系統提高了自動化水平,提高產品質量精度,降低了工人勞動強度,節約成本運動控制器 本文介紹的輥鍛傳送系統應用于某五金廠運動控制器
二 輥鍛傳送系統結構
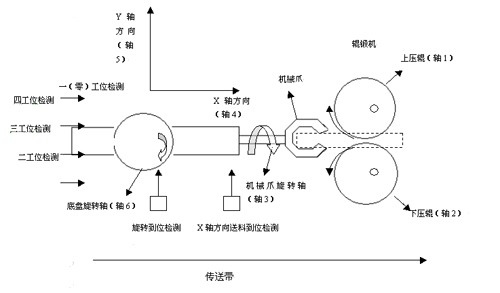
輥鍛傳送系統由輥鍛機,機械手傳送機構組成運動控制器 其中,輥鍛機由上下兩個壓輪,模具組成。模具固定在上下兩個壓輪上,由滾輪帶動實現對產品的鍛壓。滾輪由兩臺15K伺服電機同時轉動實現模具同步滾壓輥鍛傳送 機械手傳送機構由機械爪轉動軸,X方向送料軸,Y方向工位移動軸,底盤旋轉軸以及部分定位傳感器組成輥鍛傳送 具體如下圖:
三 控制流程
輥鍛機由兩臺MR-J2S-15K B4及HA-LFS15K14驅動輥鍛傳送 上下壓輥同時啟動,保持同步;機械手傳送結構主要由四臺MR-J2S-700B及HC-SFS702驅動。上下壓輥啟動由X軸方向送料到位檢測,機械瓜夾緊信號及壓輥零位信號啟動。每工位轉動一圈,回到原點,壓輥轉動過程中X軸伺服OFF,處于自由滑動狀態,自由滑動到位一檢測信號接通(送料到位信號斷開)后,X軸伺服ON,Y軸啟動,由第一工位運動至第二工位,二工位檢測信號接通,機械爪旋轉軸旋轉一定角度后,X軸啟動快速行進至二工位,到位檢測信號接通,X軸伺服OFF,處于自由狀態,上下壓輥啟動。如此,進行三工位,四工位輥壓成型。四個工位結束后,Y軸返回一工位,機械瓜旋轉軸返回原角度;底盤旋轉軸轉動一定角度,旋轉到位檢測一接通,機械爪松開,成型產品被送入傳送帶。機械爪松開后,底盤旋轉軸繼續旋轉一定角度,旋轉到位檢測二接通,自動送料系統開始送料,有料檢測接通后,機械爪抓緊;夾緊信號接通,底盤旋轉軸旋轉至原始位置,周期工作開始。
四 控制系統
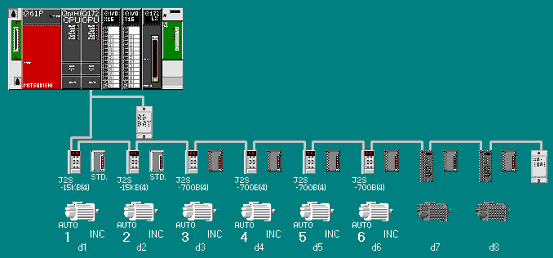
整個控制系統由6軸組成,壓輥軸功率較大;從性能穩定性考慮,我們選用兩臺MR-J2S-15KB4及HA-LFS15K14驅動上下壓輥;四臺MR-J2S-700B及HC-SFS702驅動機械手傳送結構。控制系統選用多CPU系統:Q02CPU+Q172CPUN,Q172CPUN最多可以控制8軸,編程方便簡單。用SSCNET總線與伺服放大器進行連接,方便可靠。具體參見下圖:
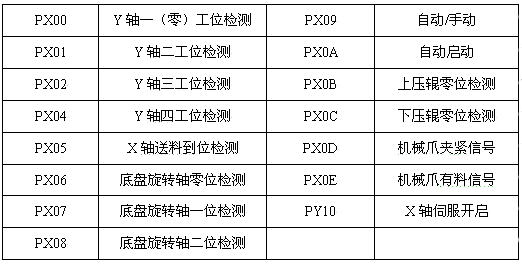
五 主要輸入輸出信號列表
六 運動SFC程序
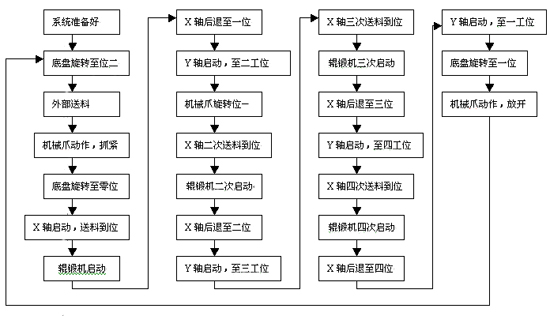
運動SFC程序(包括系統參數的設置等)采用MT Developer編寫,整個程序分為主程序,自動運行,手動運行三部分。SFC程序采用自動運行方式,用外部輸入信號作為觸發器來啟動伺服程序。多CPU 系統設置時選擇2個CPU,刷新地址采用自動刷新,不必設置地址;伺服單位系統選用脈沖單位。 程序工步流程圖如下:
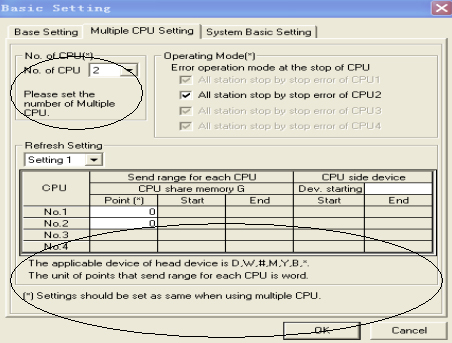
多CPU系統設置參考如下:
Q02CPU設置:
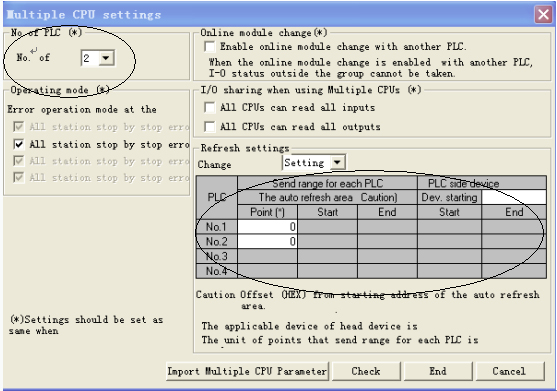
Q172CPUN設置:
結束語
本控制系統采用三菱性能優良的運動CPU系統,通過使用高速串行通信方式,運動控制器和伺服放大器之間可以快速連接,簡化接線。軟件避開煩瑣的參數設置及控制程序,采用運動SFC程序,實現復雜的伺服控制。