

新 求實合作")
")
新")
Omron PLC在機械手控制中的應用
http://www.ydsygx.cn凌控導讀:隨著社會生產不斷進步和人們生活節(jié)奏不斷加快,人們對生產效率也不斷提出新要求。由于微電子技術和計算軟、硬件技術的迅猛發(fā)展和現代控制理論的不斷完善,使機械手技術快速發(fā)展,其中氣動機械手系統由于其介質來源簡便以及不污染環(huán)境、組件價格低廉、維修方便和系統安全可靠等特點,已滲透到工業(yè)領域的各個部門,在工業(yè)發(fā)展中占有重要地位Omron PLC 本文講述的氣動機械手有氣控機械手、XY軸絲杠組、轉盤機構、旋轉基座等機械部分組成Omron PLC 主要作用是完成機械部件的搬運工作,能放置在各種不同的生產線或物流流水線中,使零件搬運、貨物運輸更快捷、便利機械手
隨著社會生產不斷進步和人們生活節(jié)奏不斷加快,人們對生產效率也不斷提出新要求機械手 由于微電子技術和計算軟、硬件技術的迅猛發(fā)展和現代控制理論的不斷完善,使機械手技術快速發(fā)展,其中氣動機械手系統由于其介質來源簡便以及不污染環(huán)境、組件價格低廉、維修方便和系統安全可靠等特點,已滲透到工業(yè)領域的各個部門,在工業(yè)發(fā)展中占有重要地位機械手 本文講述的氣動機械手有氣控機械手、XY軸絲杠組、轉盤機構、旋轉基座等機械部分組成應用 主要作用是完成機械部件的搬運工作,能放置在各種不同的生產線或物流流水線中,使零件搬運、貨物運輸更快捷、便利應用
一. 四軸聯動簡易機械手的結構及動作過程
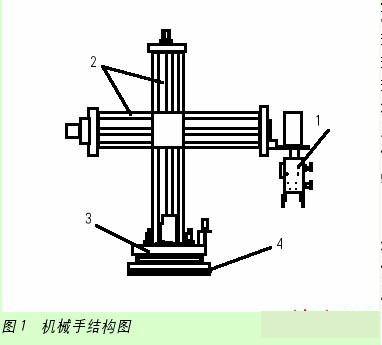
機械手結構如下圖1所示,有氣控機械手(1)、XY軸絲杠組(2)、轉盤機構(3)、旋轉基座(4)等組成應用
其運動控制方式為:(1)由伺服電機驅動可旋轉角度為360�的氣控機械手(有光電傳感器確定起始0點);(2)由步進電機驅動絲杠組件使機械手沿X、Y軸移動(有x、y軸限位開關);(3)可回旋360�的轉盤機構能帶動機械手
及絲杠組自由旋轉(其電氣拖動部分由直流電動機、光電編碼器、接近開關等組成);(4)旋轉基座主要支撐以上3部分;(5)氣控機械手的張合由氣壓控制(充氣時機械手抓緊,放氣時機械手松開)。
其工作過程為:當貨物到達時,機械手系統開始動作;步進電機控制開始向下運動,同時另一路步進電機控制橫軸開始向前運動;伺服電機驅動機械手旋轉到達正好抓取貨物的方位處,然后充氣,機械手夾住貨物。
步進電機驅動縱軸上升,另一個步進電機驅動橫軸開始向前走;轉盤直流電機轉動使機械手整體運動,轉到貨物接收處;步進電機再次驅動縱軸下降,到達指定位置后,氣閥放氣,機械手松開貨物;系統回位準備下一次動作。
二 控制器件選型
為達到精確控制的目的,根據市場情況,對各種關鍵器件選型如下:
1. 步進電機及其驅動器
機械手縱軸(Y軸)和橫軸(X軸)選用的是北京四通電機技術有限公司的42BYG250C型兩相混合式步進電機,步距角為0.9�/1.8�,電流1.5A。M1是橫軸電機,帶動機械手機構伸、縮;M2是縱軸電機,帶動機械手機構上升、下降。所選用的步進電機驅動器是SH-20403型,該驅動器采用10~40V直流供電,H橋雙極恒相電流驅動,最大3A的8種輸出電流可選,最大64細分的7種細分模式可選,輸入信號光電隔離,標準單脈沖接口,有脫機保持功能,半密閉式機殼可適應更惡劣的工況環(huán)境,提供節(jié)能的自動半電流方式。驅動器內部的開關電源設計,保證了驅動器可適應較寬的電壓范圍,用戶可根據各自情況在10~40VDC之間選擇。一般來說較高的額定電源電壓有利于提高電機的高速力矩,但卻會加大驅動器的損耗和溫升。本驅動器最大輸出電流值為3A/相(峰值),通過驅動器面板上六位撥碼開關的第5、6、7三位可組合出8種狀態(tài),對應8種輸出電流,從0.9A到3A以配合不同的電機使用。本驅動器可提供整步、改善半步、4細分、8細分、16細分、32細分和64細分7種運行模式,利用驅動器面板上六位撥碼開關的第1、2、3三位可組合出不同的狀態(tài)。
2. 伺服電機及其驅動器
機械手的旋轉動作采用松下伺服電機A系列小慣量MSMA5AZA1G,其額定輸出50W、100/200V共用,旋轉編碼器規(guī)格為增量式(脈沖數2500p/r、分辨率10000p/r、引出線11線);有油封,無制動器,軸采用鍵槽連接。該電機采用松下公司獨特算法,使速度頻率響應提高2倍,達到500Hz ;定位超調整定時間縮短為以往松下伺服電機產品V系列的1/4。具有共振抑制功能、控制功能、全閉環(huán)控制功能,可彌補機械的剛性不足,從而實現高速定位,也可通過外接高精度的光柵尺,構成全閉環(huán)控制,進一步提高系統精度。具有常規(guī)自動增益調整和實時自動增益調整兩種自動增益調整方式,還配有RS-485、 RS-232C 通信口,使上位控制器可同時控制多達16個軸。伺服電機驅動器為A系列MSDA5A3A1A,適用于小慣量電動機。
3. 直流電機
可回旋360�的轉盤機構有直流無刷電機帶動,系統選用的是北京和時利公司生產的57BL1010H1無刷直流電機,其調速范圍寬、低速力矩大、運行平穩(wěn)、低噪音、效率高。無刷直流電機驅動器使用北京和時利公司生產的BL-0408驅動器,其采用24~48V直流供電,有起停及轉向控制、過流、過壓及堵轉保護,且有故障報警輸出、外部模擬量調速、制動快速停機等特點。
4. 旋轉編碼器
在可回旋360�的轉盤機構上,安裝有OMRON公司生產的E6A2增量型旋轉編碼器,編碼器將信號傳給PLC,實現轉盤機構的精確定位。
5. PLC的選型
根據系統的設計要求,選用OMRON公司生產的CPM2A小型機。CPM2A在一個小巧的單元內綜合有各種性能,包括同步脈沖控制、中斷輸入、脈沖輸出、模擬量設定和時鐘功能等。CPM2A的CPU單元又是一個獨立單元,能處理廣泛的機械控制應用問題,所以它是在設備內用作內裝控制單元的理想產品。完整的通信功能保證了與個人計算機、其它OMRON PC和OMRON可編程終端的通信。這些通信能力使四軸聯動簡易機械手能方便的融合到工業(yè)控制系統中。
三 軟件編程
1. 軟件流程圖
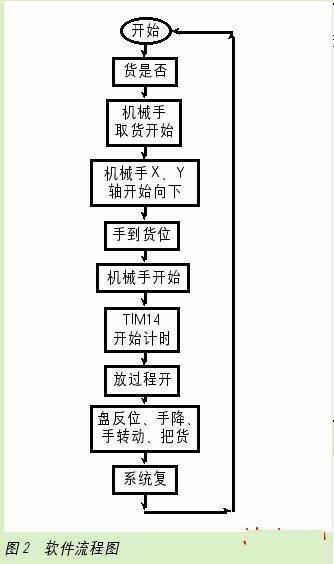
流程圖是PLC程序設計的基礎。只有設計出流程圖,才可能順利而便捷地編寫出梯形圖并寫出語句表,最終完成程序的設計。所以寫出流程圖非常關鍵也是程序設計首先要做的任務。依據四軸聯動簡易機械手的控制要求,繪制流程圖如圖2所示。
2. 程序部分
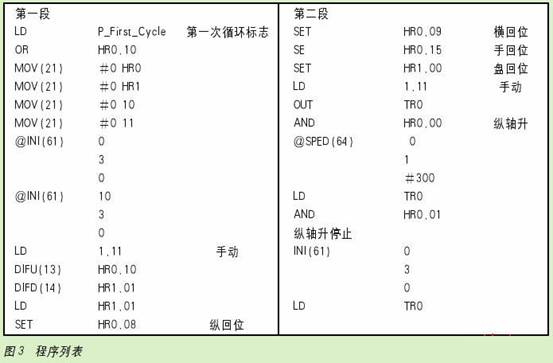
由于論文篇幅有限,這里只列出了開始兩段程序,供讀者參閱,見圖3。
四 結束語
四軸聯動簡易機械手的各個動作和狀態(tài)都由PLC控制,不僅能滿足機械手的手動、半自動、自動等操作方式所需的大量按扭、開關、位置檢測點的要求,更可通過接口元器件與計算機組成PLC工業(yè)局域網,實現網絡通信與網絡控制。使四軸聯動簡易機械手能方便地嵌入到工業(yè)生產流水線中。